Lecture 09: Acceleration structures
Computer graphics in Game development
05.02.2022
Raytracing complexity
In the case of 1 ray per pixel without additional ray casting the complexity of ray tracing is rays number * (triangles number * MT algorithm cost + Closest Hit cost)
![From: [1]](img/ShaderPipeline.svg) [2]
[2]
Bounding volume
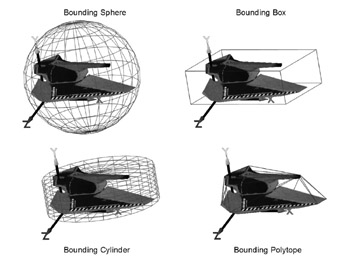
Axis-aligned bounding boxes (AABB)
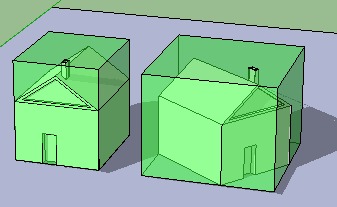
Bounding volume hierarchy
- Top-level acceleration structures (TLAS)
- Bottom-level acceleration structures (BLAS)
![From: [1]](img/accelerationStructure.svg)
Question: why TLAS won’t speed up the Cornell box scene?