Lecture #03. Vertex transformations
Computer graphics in Game development
Ivan Belyavtsev
09.09.2022
Rendering pipeline
Vertex data
- Vertex position (in cartesian coordinates)
- Vertex normal
- Texture coordinates
- Vertex color (diffuse, specular, ambient)
Vertex position transformation
Goal: find a transformation of the vertex position to a screen position
- From model space to world space
- From world space to view space (camera space)
- From view space to projection space
- From projection space to clipping space
- From clipping space to homogeneous screen space
- From homogeneous screen space to screen space [1]
Spaces
- Model space - coordinate system where the object was created
- World space - where all object located in proper locations
- View space - a space located around camera
- Projection space - a projected camera frustrum to cube space
- Screen space - a space of resulted image [2]
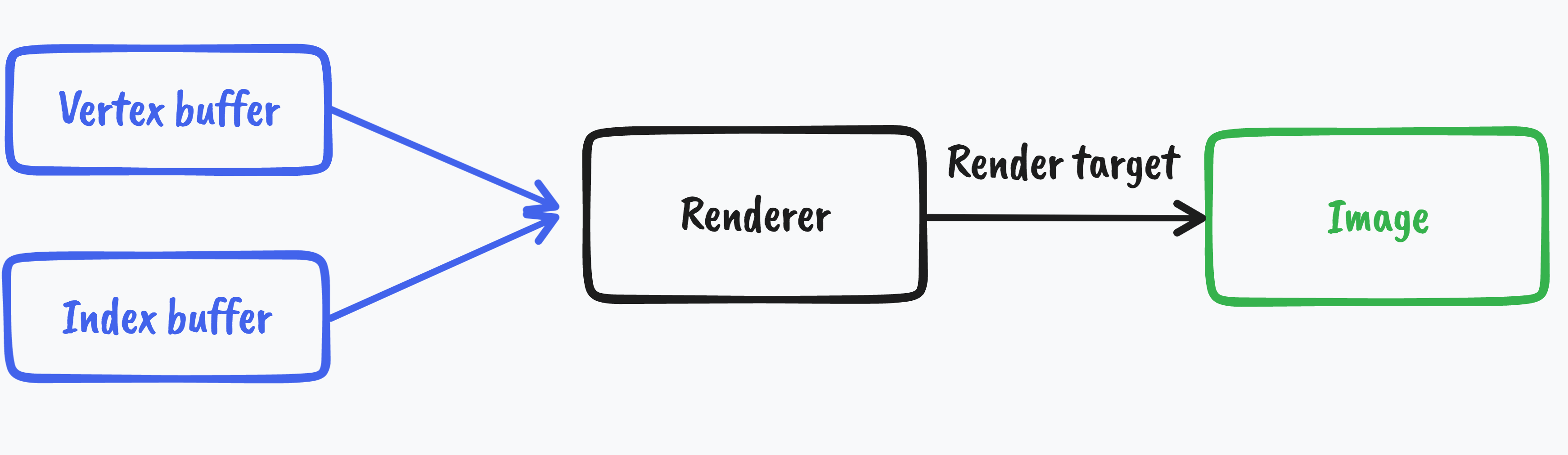
Rendering pipeline: Input-Assembler stage
- Read index and vertex buffers
- Assemble a primitive (triangle)
- Convert cartesian coordinates to homogeneous coordinates [3]
Homogeneous coordinates
Homogeneous coordinates - cartesian coordinates + 1 dimension
\[ (X, Y, Z) => (x, y, z, w) \]
\[ X = x/w, Y = y/w, Z = z/w \] [4]
Transformations in homogeneous coordinates
\[T(\overrightarrow{x}) = A\overrightarrow{x}\]
where \[A = \left[\begin{array}{cccc} x1 & x2 & x3 & x4 \\ y1 & y2 & y3 & y4 \\ z1 & z2 & z3 & z4 \\ w1 & w2 & w3 & w4 \end{array}\right]\] [5]
Rendering pipeline: Vertex shader stage
- Make a vertex transformation from model space to projection space
- Adjust or passthrough rest vertex data
- Graphics programmer should write a code to perform the stage [6]
Vertex shader transformations
Model space -> World space -> View space -> Projection space
Translation in homogeneous coordinates
\(\overrightarrow{tr}\) - vector of translation
\[T = \left[\begin{array}{cccc} 1 & 0 & 0 & tr.x \\ 0 & 1 & 0 & tr.y \\ 0 & 0 & 1 & tr.z \\ 0 & 0 & 0 & 1 \end{array}\right]\] [5]
Scaling in homogeneous coordinates
\(\overrightarrow{scale}\) - vector of scaling
\[S = \left[\begin{array}{cccc} scale.x & 0 & 0 & 0 \\ 0 & scale.y & 0 & 0 \\ 0 & 0 & scale.z & 0 \\ 0 & 0 & 0 & 1 \end{array}\right]\] [5]
Rotation around X
\(\alpha\) - angle of rotation around axis X
\[R_x = \left[\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & cos(\alpha) & -sin(\alpha) & 0 \\ 0 & sin(\alpha) & cos(\alpha) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right]\] [5]
Rotation around Y
\(\beta\) - angle of rotation around axis Y
\[R_y = \left[\begin{array}{cccc} cos(\beta) & 0 & sin(\beta) & 0 \\ 0 & 1 & 0 & 0 \\ -sin(\beta) & 0 & cos(\beta) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right]\] [5]
Rotation around Z
\(\gamma\) - angle of rotation around axis Z
\[R_z = \left[\begin{array}{cccc} cos(\gamma) & -sin(\gamma) & 0 & 0 \\ sin(\gamma) & cos(\gamma) & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{array}\right]\] [5]
World transformations
\[World=TRS\]
First scale, then rotate, then translate
Camera model
- \(\overrightarrow{eye}\) - camera location vector
- \(\overrightarrow{at}\) - camera look-at target
- \(\overrightarrow{up}\) - camera up vector (or world up direction)
Why we need to specify up direction

View transformations
\[ \overrightarrow{z_{axis}} = \frac{\overrightarrow{eye} - \overrightarrow{at}}{||\overrightarrow{eye} - \overrightarrow{at}||} \] \[ \overrightarrow{x_{axis}} = \frac{\overrightarrow{up} \times \overrightarrow{z_{axis}}}{||\overrightarrow{up} \times \overrightarrow{z_{axis}}||}\] \[ \overrightarrow{y_{axis}} = \overrightarrow{z_{axis}} \times \overrightarrow{x_{axis}} \]
View transformations
\[View = \left[\begin{array}{cccc} x_{axis}.x & y_{axis}.x & z_{axis}.x & 0 \\ x_{axis}.y & y_{axis}.y & z_{axis}.y & 0 \\ x_{axis}.z & y_{axis}.z & z_{axis}.z & 0 \\ -\overrightarrow{x_{axis}} \cdot \overrightarrow{eye} & -\overrightarrow{y_{axis}} \cdot \overrightarrow{eye} & -\overrightarrow{z_{axis}} \cdot \overrightarrow{eye} & 1 \end{array}\right]\]
Camera model ideas
Look-at target could be replaced as camera location vector + unit camera direction vector.
Unit direction vector could be set in spherical coordinates.
Projection parameters
- \(fov\) - field of view angle
- \(ar\) - aspect ratio (width to height)
- \(Z_n\) - distance to the near clipping plane along Z axes in camera space
- \(Z_f\) - distance to the far clipping plane along Z axes in camera space
Perspective projection
\[Proj = \left[\begin{array}{cccc} \frac{1}{tan(fov/2)\cdot ar} & 0 & 0 & 0 \\ 0 & \frac{1}{tan(fov/2)} & 0 & 0 \\ 0 & 0 & \frac{Z_f}{Z_n-Z_f} & -1 \\ 0 & 0 & \frac{Z_n\cdot Z_f}{Z_n-Z_f} & 0 \end{array}\right]\]
Vertex shader transformation
\[\vec{X} = Proj \cdot View \cdot World \cdot \vec{x}\]
Dangerous zone
Remember about left-handed and right-handed operations!
Check correctness of each matrix, e.x. in DirectX documentation [1]
Lab: 1.04 Vertex transformation
- Implement
cg::world::cameraclass - Setup an instance of camera
cg::world::cameraclass incg::renderer::rasterization_renderer - Implement
vertex_shaderlambda for the instance ofcg::renderer::rasterizer - Add
IAandVertex shaderstages todrawmethod ofcg::renderer::rasterizer